All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(3581 products available)












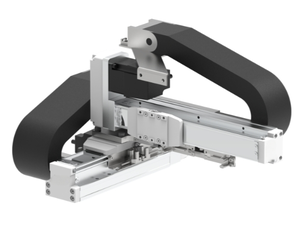


























3-axis robotic arms are categorized based on specific characteristics such as their drive, configuration, and the type of end-effector used. Here's a compilation of the popular types of three-axis robotic arm machines:
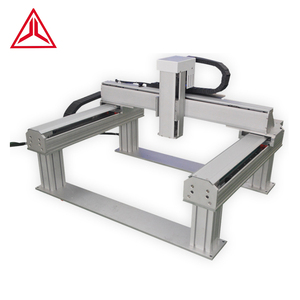
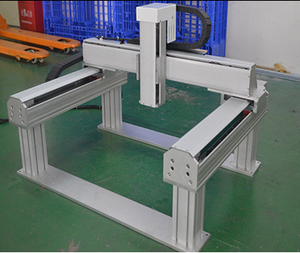
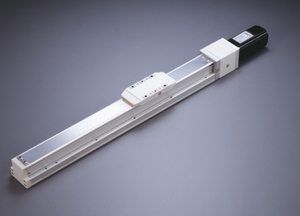
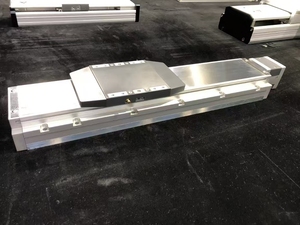
Cartesian/linear robots
The cartesian robotic arm is the most common 3-axis robotic arm because it is synchronized to move along the X, Y, and Z straight lines, making an ideal cube grid or box shape. These robotic arms with 3D printing metal are very easy to control and program and are widely used in industries for product transfer and assembly. They produce good quality work and make very little noise at work, and compared to other robots, they are considerably less expensive.
SCARA robots
They are 4-axis or 3-axis robots that provide vertical up and down movement in a line, with the other three joints moving just like the human shoulders and arms in a circle. Selective soldering systems are suitable for tasks in horizontal planes and have a degreed flexibility that makes them suitable for narrow space operations. SCARA arms are widely employed in assembly work, especially in things like inserting parts into circuit boards.
Articulated robots
This kind of robotic arm is likened to a human arm in structure and movement. It has joints or rotary (or axial) degrees of freedom) that permit it to reach several positions. Although not true 3-axis robots (because most articulated arms tend to be more than three axes), many robotic arms for 3D printing are articulated and used intensively for diverse industrial activities. They are perfect, especially where dexterity is required, like in welding, painting, or assembly.
Delta robots
Delta robots consist of a few arm joints in a triangular or delta shape configuration. The main difference with articulated arms is that while the former moves in a more spherical fashion, the latter moves in a linear path, The limbs of the Delta robot are interlinked, thus allowing the end effector to move in three dimensions. Delta arms work well for robot picking systems and are known for their high-performance speed and accuracy. In fields where speed and accuracy are important, like packaging and sorting, Delta robots are fit.
Cylindrical robots
Three-axis robotic arms include robotic machines called cylindrical robots that operate by alternating X or Y linear motions with a Z axial rotation. These robotic arms are That useful in confined areas because of their cylindrical joint construct. Robotic arms are used extensively in assembly processes where restrictions in space are an issue. A cylindrical robot is also capable of performing assembly work because it possesses some degree of flexibility.
Three-axis robotic arms are used in numerous industrial fields because of their flexibility and efficiency in performing various tasks. Following are some of the areas of application of these machines:
Manufacturing
Three-axis robotic arms are used widely in manufacturing industries, especially in product assembly processes. They improve the process by fixing the orientation in which the parts are made, thus eliminating human errors and increasing the speed at which an item is put together. For example, in the electronic industry, 3-axis robotic arms are used to assemble circuit boards by soldering components within a defined range of movements. This applies to robotic arms meant for heavy objects as well as those meant for delicate objects.
Material handling
Robotic arms serve an important purpose in lifting and moving substances within production lines. They can be programmed to automate the transporting of objects from one section or workstation to another, from stacking products onto pallets, and especially eliminating the fatigue experienced by lots of workers in manual labor. This is mostly seen in warehouse operations where items are sorted, picked, and packaged. In manufacturing plants, three robotic arms are often utilized to position raw materials to enhance the flow of work in an organization.
Quality inspection
Three-axis robotic arms have highly improved the quality control processes in many industries. Integrated with sensors like cameras and lasers, these robots can perform measurements, flaw detection, and check product conformity much faster than the human eye. Robotic arms apply traditionally used computer vision to inspect an item at a point in time for defects and ensure it conforms to the expectedspecifications. This advancement results in better quality control.
Packaging
Three-axis robotic arms are commonly found in packaging duties within industries to speed up the packing process and do it correctly. These robotic arms perform product positioning, sealing boxes, and pallet stacking. In the food and beverage industries specifically, robotic arms help with filling bottles, placing products inside cases, and enhancing hygiene levels by cutting human contact with food products.
Welding and fabrication
Most welding activities, particularly in the automobile industry, are achieved through three-axis robotic arms. These are articulated arms that form complex joint movements to weld parts in straight or rounded shape. In fabrication processes, three-axis robotic arms are used to cut metals, bend them, and perform other operations needed to come up with a finished product. Automation in this area helps enhance consistency in the quality of welds and reduce the risk of workplace conditions.
Three-axis robotic arms have unique structural and functional properties to suit their operational purpose. The following are important points regarding the specifications and characteristics of a three-axis robotic arm:
End-Effector Types
The end effector is a component located at the end of a robotic arm and is utilized to interact with objects. For three-axis robotic arms, end-effectors can be of various types depending on the process to be executed: grippers for picking and placing , any kind of tool holder for machining, suction cups for manipulating delicate items, and welding torches for welding depending on the type of robotic arm and the industrial application. Selecting the right end-effector is instrumental in enhancing the performance of robotic arms.
Payload capacity
This is the maximum load a robotic arm could still carry without losing its effectiveness. 3D Axis robotic arms exhibit different payload capacities, and this is largely determined by their size and construction. Low-payload arms operate best for tasks that require light handling, such as the assembly of miniature parts, while high-payload arms are used for product stacking or heavy material handling. In choosing a robotic arm, it is important to match the application's requirements with its payload capacity to achieve the best lifting, moving, or manipulating effects.
Speed and accuracy
Speed and accuracy are two main parameters for judging the quality of 3-axis robotic arms. A larger percentage of robotic arms are made to work continuously at a speed of anywhere between 100 and 1000 mm every minute. With a mean value of around 3 mm, accuracy can be considered as such. For operations that demand more precision, such as surgical arms or insertion, accuracy count is vital. Usually, speed and accuracy are sometimes at odds; hence, it becomes important to assess the needs of the application to achieve a proper balance.
Control System
The control system is the component for operating and directing the robotic arm. It comprises computers and software, which usually are programmed using specific tools (often a kind of programming language) to move the arm in the desired direction. Most 3D axis robotic arms can be simply programmed, thanks to developments in human-computer interaction. They can be operated using teach pendant, which is instructing them to make movements and later recalling those movements through programs. Therefore, it enables users without prior knowledge to handle the arms easily and maintain them.
Structure materials
Considering the kind of activity, three-axis robotic arms are made out of different materials. Most arms are fabricated using metals such as aluminum and steel since they are strong. Lighter arms are made using composite materials or industrial plastics. The type of material used in making equipment affects its rigidity, long life span, and maximum payload capacity.
When choosing a three-axis robotic arm, other important factors for optimal performance based on application needs must be considered. Following are the some of the considerations:
Industrial application
To make an informed choice, considering the area where the robotic arm is to be used most is imperative. This is because different industries have different needs. A robotic arm with an end effector meant for specific tasks such as product handling or machining is suitable for manufacturing and warehousing. For activities involving precise assembly or surgical procedures in electronics or medical applications, a robot arm with a higher degree of precision and an efficient control mechanism should be selected.
Payload capacity
Payload capacity refers to the maximum weight that a robotic arm can carry, and it should match the items it handles. Great care must be taken not to use an arm with a low payload capacity to handle heavy loads, as this will likely damage the arm; on the other hand, an arm with a large payload capacity handling light loads is equally uneconomical. Find out the average weight of the items that the robotic arm will manipulate, and choose one with the corresponding payload capacity.
Precision and speed
The required degree of accuracy also depends on the kind of task to be done. While simple tasks like material transfers do not require most robotic arms working at speeds between 100 and 1000 mm/min, accurate assembly or surgical procedures need a low flow metering with high accuracy. There often exists a trade-off between speed and precision. It is important to define the application's requirements to ensure an adequate balance.
Control system and programming
Another important point to consider is the three-axes robotic arm controller, as well as its ease of programming, especially for inexperienced users. Intuitive interfaces and additional teaching methods will be of great assistance to the robotic operators with little experience. The programming language should be consistent with the user's skills and do well with other systems. The controllability of the arm has an obvious influence on the repeatability of the process and its accuracy in implementing tasks.
Budget and cost-effectiveness
Robotic arms also vary in costs. Generally, high-end arms with more precision and increased payload capacity come at a high cost. Establishing a budget must be done first with the understanding that selection must be done based on the ultimate goal of achieving a return on investment. While an inexpensive robot might be appealing at first sight, it could also lead to increased production time, decreased workflow efficiency, and even more incurred costs over time.
Which 3D axis robotic arm is basically the most common in industry? Cartesian robots are the type of 3-axis robotic arms that are most widely used, especially those that are involved in material movement, assembly, and packaging.
How do the 3-axis robotic arms work? Three-axis robotic arms work by using three motors to make the various joints or axes move. The robotic arm then moves by giving each motor specific orders that move the arm into the right position.
What should I be looking for in a three-axis robotic arm regarding payload capacity? The payload capacity of a three-axis robotic arm is one of the important factors because it refers to the weight that the arm can carry as it performs its tasks. It has to possess a proper payload capacity suitable for the items it should handle.
Are there any costs associated with owning a robotic arm? Maintenance costs exist for an arm, and they include routine inspections, part replacements, and possibly software upgrades. Maintenance is one of the factors in robotic arms that reduces its affordability.
What is the end effector of a robotic arm? The end effector of a robotic arm is a component located at the end of the arm that interacts with objects. Common examples of end-effectors include grippers, suction cups, and welding tools.
What kind of materials are 3-axis robotic arms made of? They are made of materials like steel, aluminum, and industrial-grade plastics to ensure a combination of strength and weight.